About Me

I'm Weishuai Zeng, a final-year undergraduate majoring in Artificial Intelligence at EECS, Peking University. My research is centered on building a general-purpose humanoid robots for open-world environments, with particular emphasis on specific issues including Hierarchical Planning and Control, Perception and Recognition, Scene and Object Interaction and Cross-embodiment Learning. Recently, I have been intrigued by the idea of establishing a unified abstraction for diverse forms of humanoid control, with the long-term vision of achieving a "GPT moment" for humanoid robots.
Currently, I am working with Dr. Jingbo Wang and Dr.Jiangmiao Pang at InternRobotics, Shanghai Artificial Intelligence Laboratory. Previously, I interned at the Beijing Academy of Artificial Intelligence (BAAI) where I had the opportunity to explore domains such as Large Foundation Models, Embodied Agents, Animation and Virtual Characters. These experiences serve as foundation to support my passion on humanoid robots, which I deeply appreciate.
I welcome discussions and collaborations on any of the topics mentioned above, as I firmly believe that collaboration brings real science.
I am applying for a PhD position in 2026 Fall. Please drop me an email if you are interested in anything about me.
Publications
Selected
All
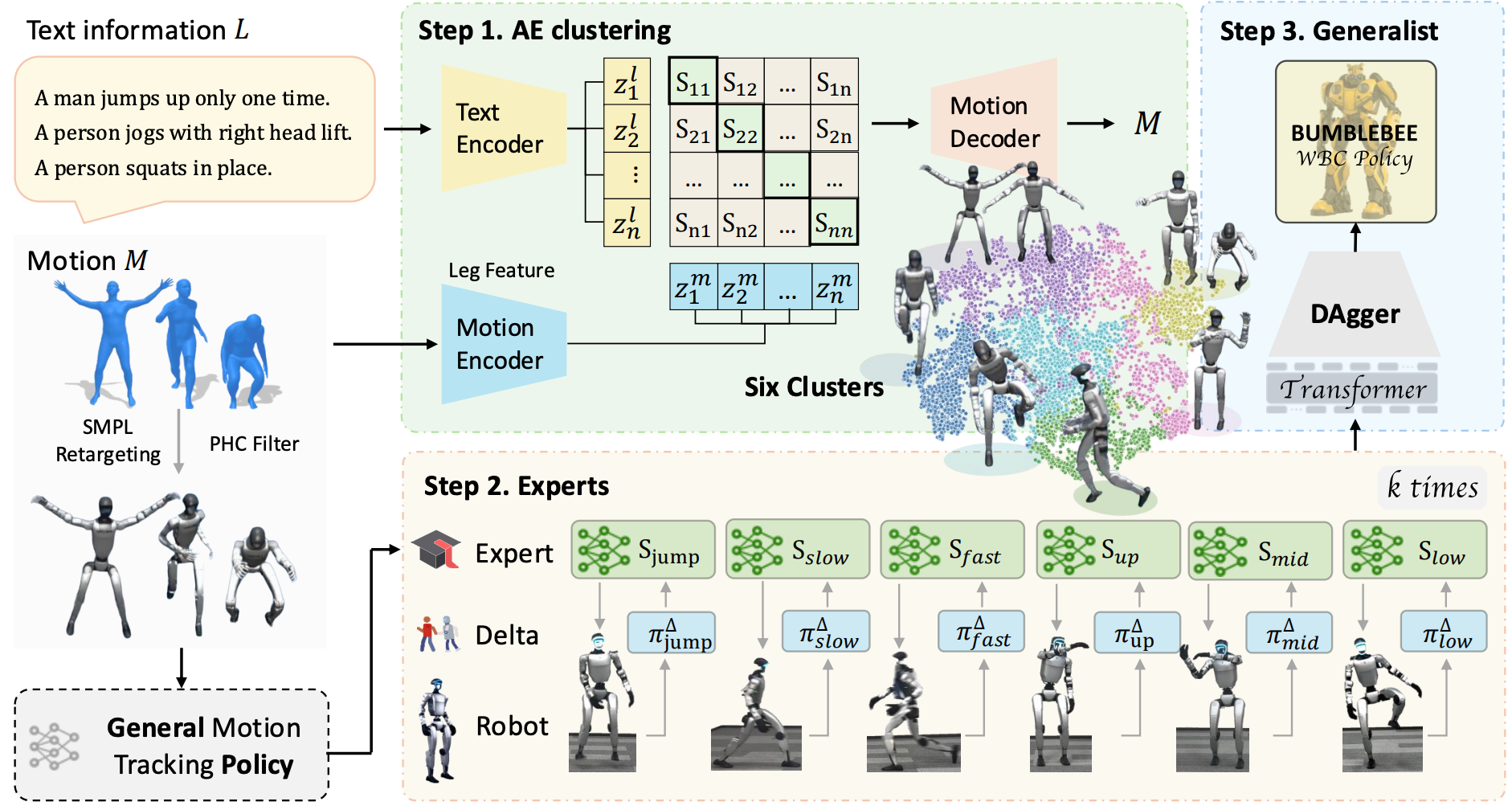
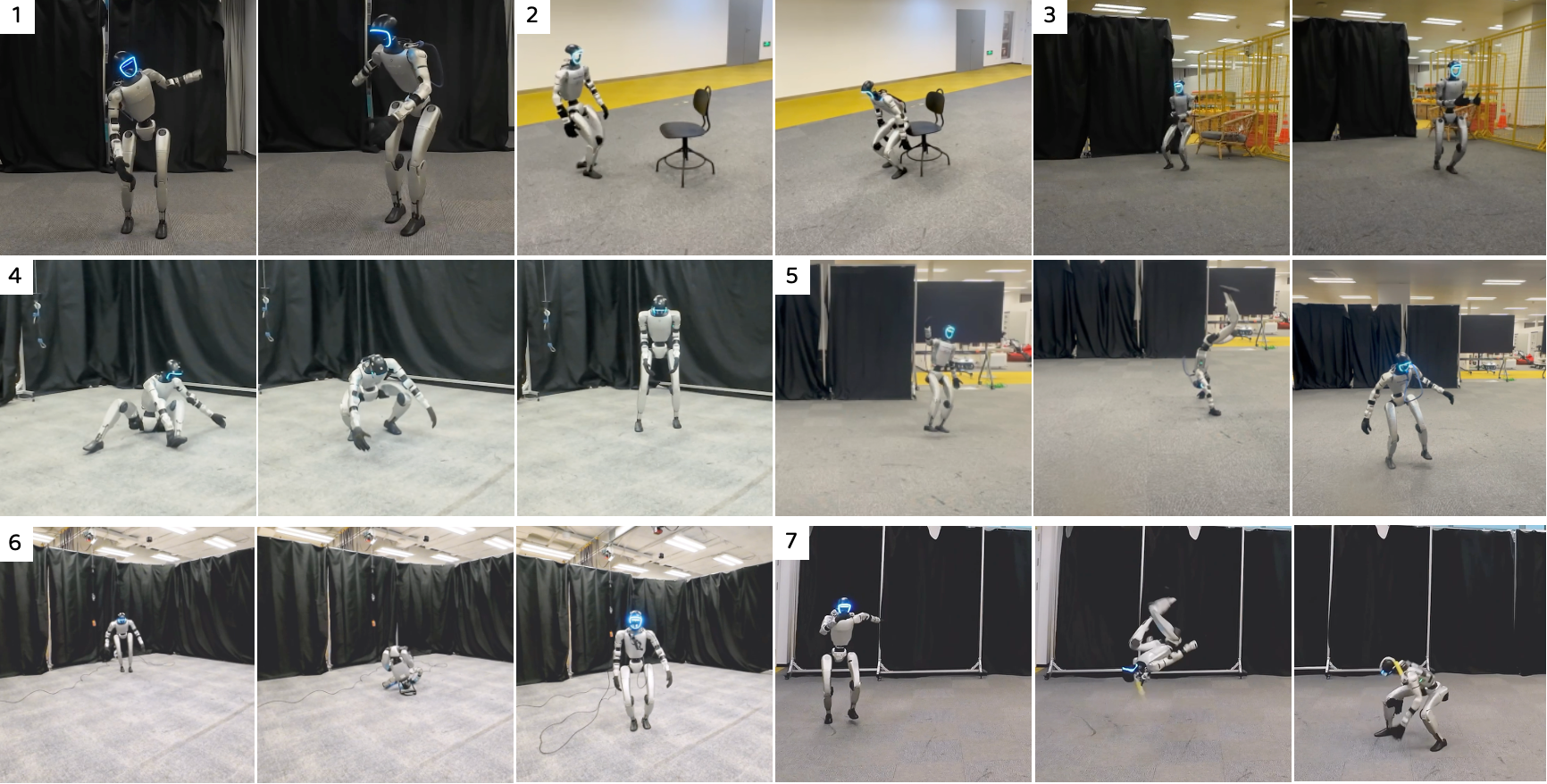
From Experts to a Generalist: Toward General Whole-Body Control for Humanoid Robots
Featured Projects

Project Title
- Featured Skills
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Check it out
Project Title
- Featured Skills
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Check it out